Nitinol Spring for Forward Movement
Creator: Qian Xi Cissy Lou
Supervisor: Peter Yeadon
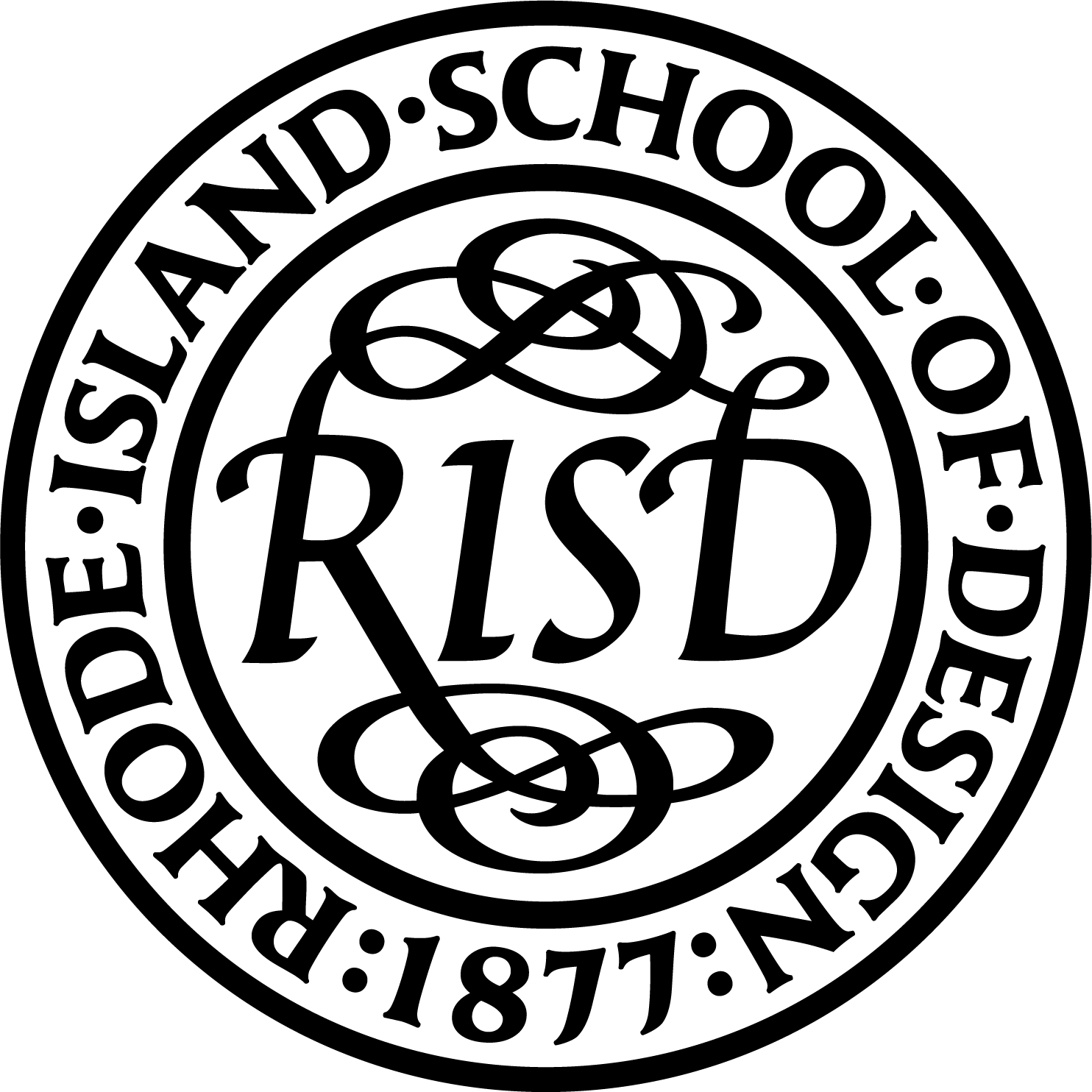
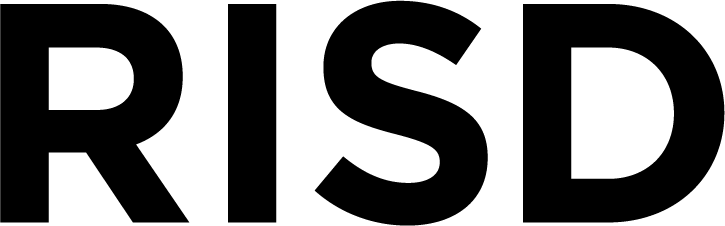
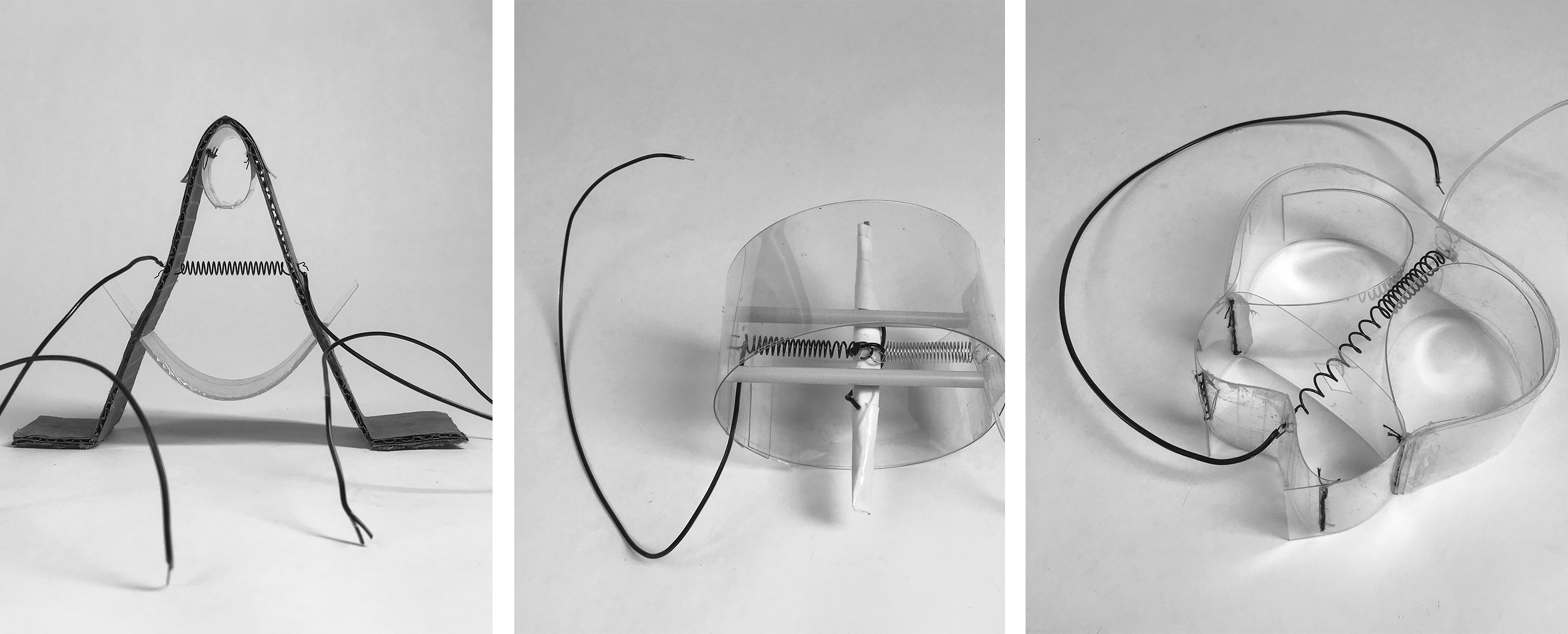
These three studies explore the kinetic potential of shape memory alloy springs (SMAs) that change shape in response to changes in temperature. The intent was to create locomotion by balancing stresses and strains in the SMAs and the flexible plastic sheets. Three artifacts were designed: The Walker, The Roller, and The Glider. In all three, the electrical resistance of the SMAs causes the springs to warm up and contract in a closed circuit. When the circuit is opened, the springs cool down again, permitting the flexible plastic to return the SMAs to their original shape.
A velour sheet with nap helped the Walker get its footing, so to speak. The velour is smooth when brushed in one direction, and prickly the opposite direction. So when the artifact contracts, the back foot moves forward while the front foot does not move, and vice versa when the artifact expands. The Glider employs the same mechanism as the Walker, but is intended to resolve stability issues by lowering the artifact’s overall height. Because all materials used in the Glider perform like muscles, without the need for structural bones, the Glider is more efficient at its material use. The Roller is intended to roll forward as its center of mass changes. The future application of these SMA studies could be an energy efficient robot that operates in a specific terrain, wherein smart materials replace its motors.
Previous Next
Back︎︎︎