SwimBot
Creator: Yuqing Mao
Supervisor: Peter Yeadon
This study conceives of a new kind of robotic swimmer that can maneuver through water with great agility and accuracy. The SwimBot must be designed to be able to move independently through water and have the capability to adjust its speed, direction, and depth. It should also have the ability to detect obstacles and navigate around them. Additionally, the robot needs to be waterproof, durable, and have the capability to travel long distances underwater.
The applications of this robotic swimmer are vast and include underwater cave exploration, sewer projects, and well projects. It could be used to navigate tight spaces and areas that are difficult to access by humans. The robot could also be outfitted with waterproof cameras or other tools to help with projects.
The applications of this robotic swimmer are vast and include underwater cave exploration, sewer projects, and well projects. It could be used to navigate tight spaces and areas that are difficult to access by humans. The robot could also be outfitted with waterproof cameras or other tools to help with projects.
Furthermore, it could be used in search and rescue operations and for monitoring water bodies for pollutants or contaminants.The robotic swimmer could also be used for recreational purposes. It could be used for remote exploration of coral reefs and other aquatic environments.
Additionally, it could be used to assist with underwater photography and videography. It could also be used to explore shipwrecks and other underwater archaeological sites.
Overall, the SwimBot would be a versatile tool that could have a wide range of applications, all enabled by its ability to move. And that was the focus of this study: to explore the means by which a body might move through water.
Additionally, it could be used to assist with underwater photography and videography. It could also be used to explore shipwrecks and other underwater archaeological sites.
Overall, the SwimBot would be a versatile tool that could have a wide range of applications, all enabled by its ability to move. And that was the focus of this study: to explore the means by which a body might move through water.
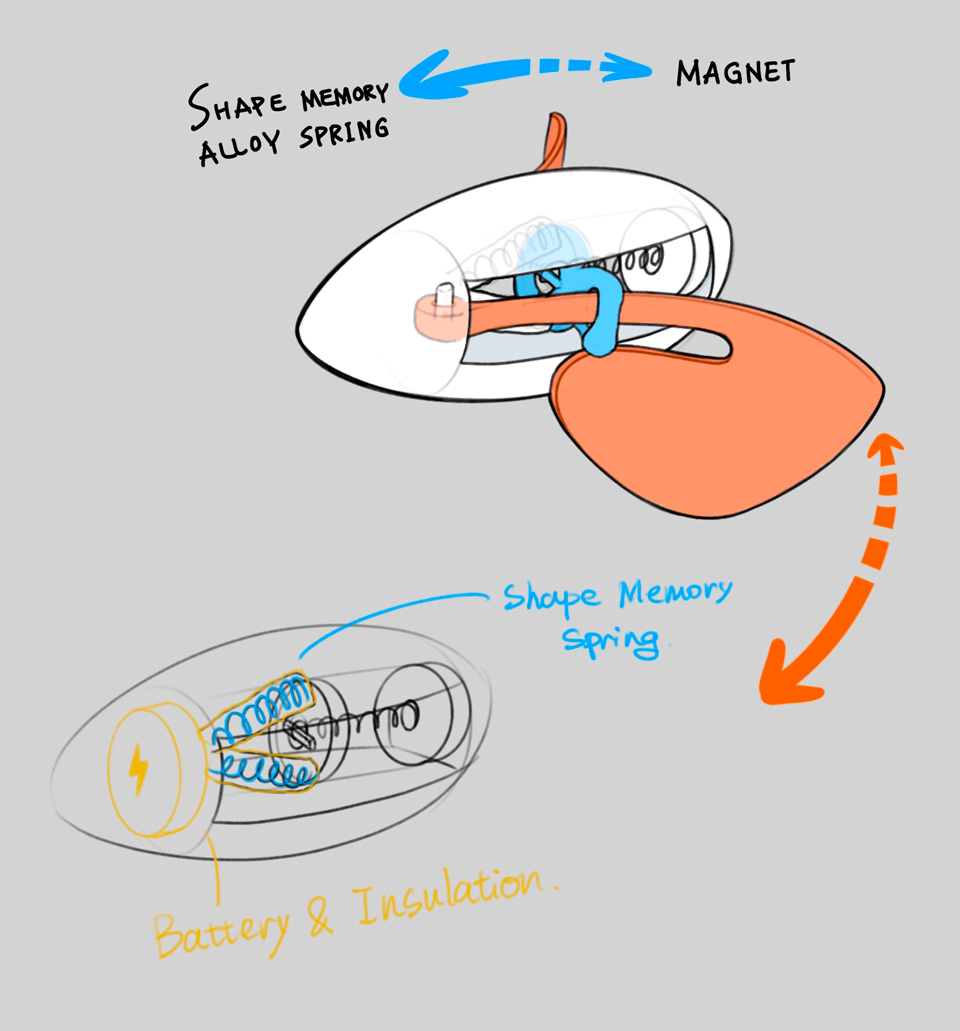
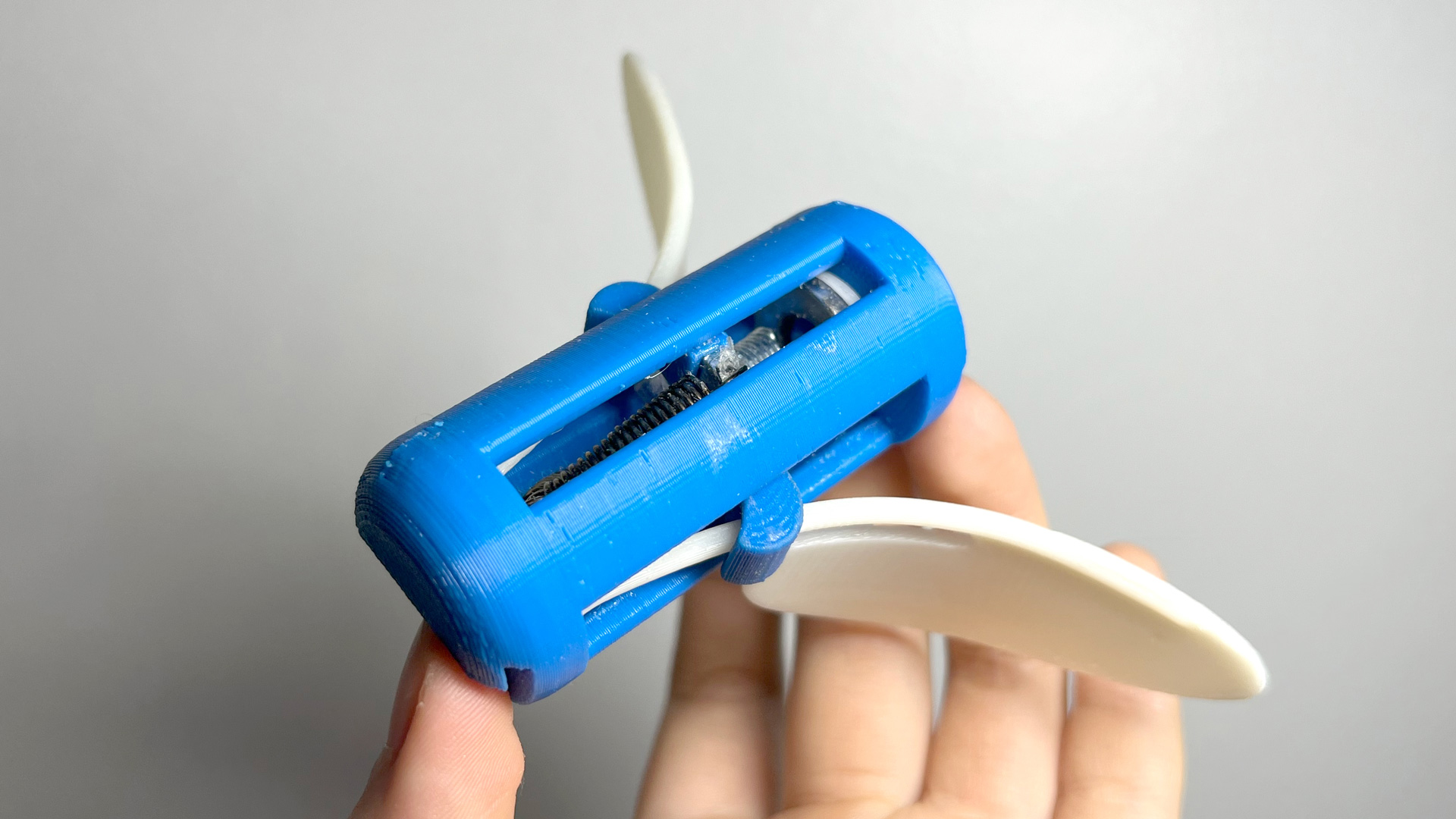
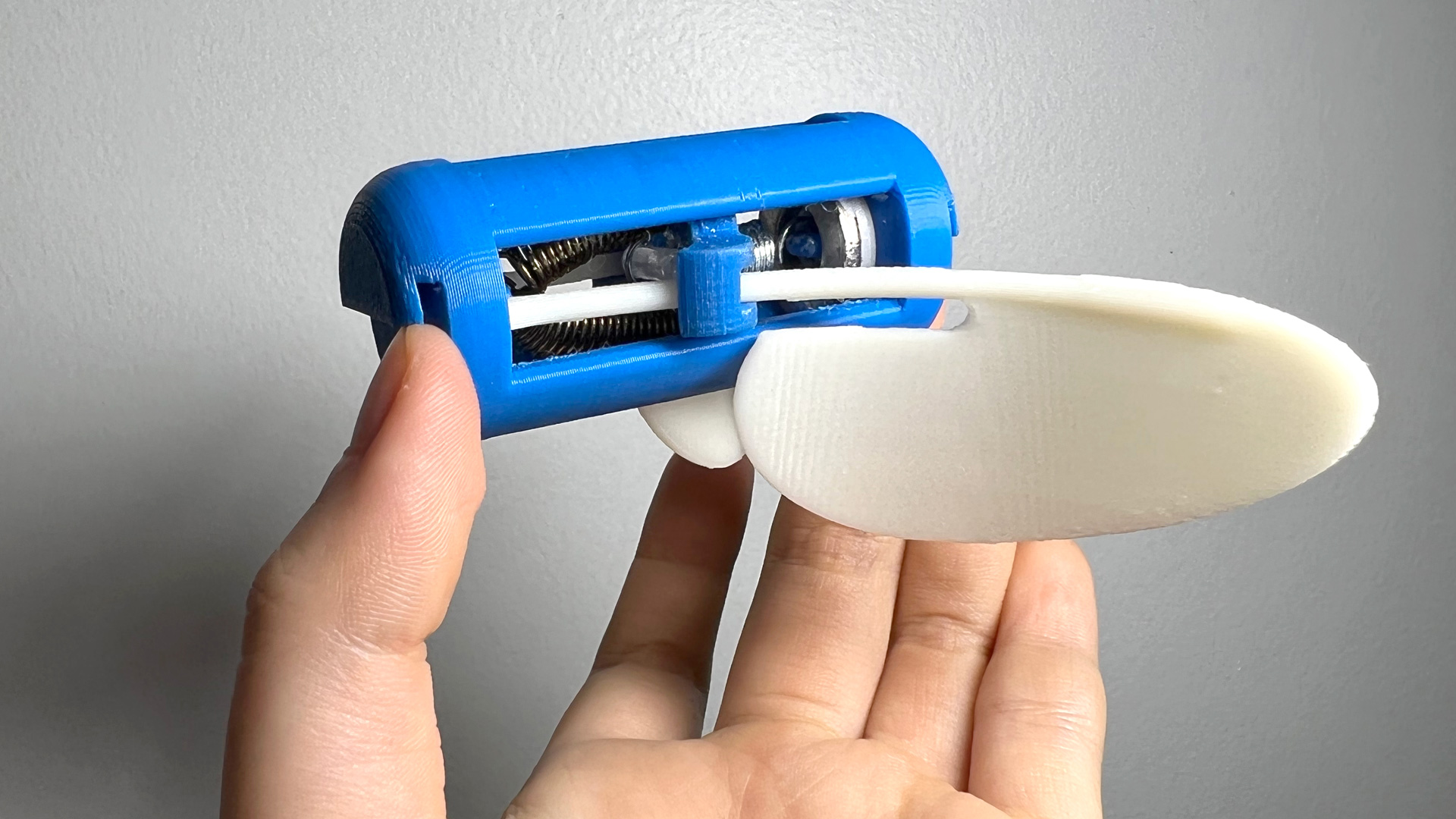
For propulsion under water, Yuqing Mao explored the potential of shape memory alloy (SMA) actuators, as a means to create repeatable, constant motion. Experimentation with the smart material result in a motor mechanism that consists of two SMA springs, a pair of magnets, and a regular counterspring. The SMA motor assembly moves paddles that are shaped to advance the body of the SwimBot, which is smaller than a human hand.
Stored electricity is used to heat up the SMA springs, causing the material muscles to contract and suddenly pull away from the magnets; this generates a sudden motion (see video, below) and a forwards thrust.
When the SMAs are permitted to cool, the counterspring and magnets stretch the SMA spring out again, producing a gradual motion that pivots the paddles.
When the SMAs are permitted to cool, the counterspring and magnets stretch the SMA spring out again, producing a gradual motion that pivots the paddles.
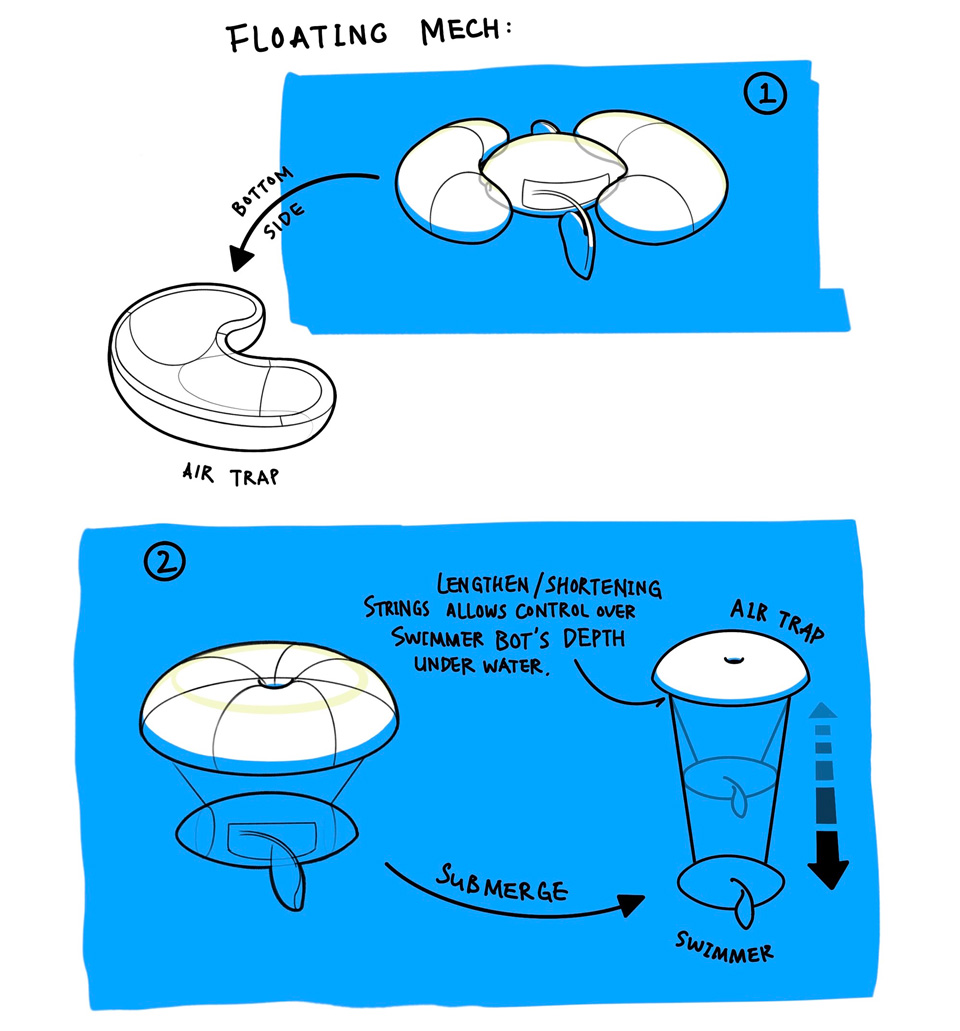
To further expand the capability of the SwimBot, an airbag companion has been proposed. This airbag would be connected to the swimmer and filled with air to help keep it afloat.
The airbag would also provide an adjustable buoyancy level, allowing the robot to make dives in shallow water.
Previous Next
Back︎︎︎